
Swarm Robotics
Underwater swarm robotics
Underwater swarm robotic systems comprise many relatively simple robots that work together to solve complex problems. They can find downed aircraft, monitor underwater environments and pipelines (and more). These systems are decentralized to make them robust a single point of failure (e.g. a craft) and dynamic in re-configuring themselves to solve a challenge at hand.
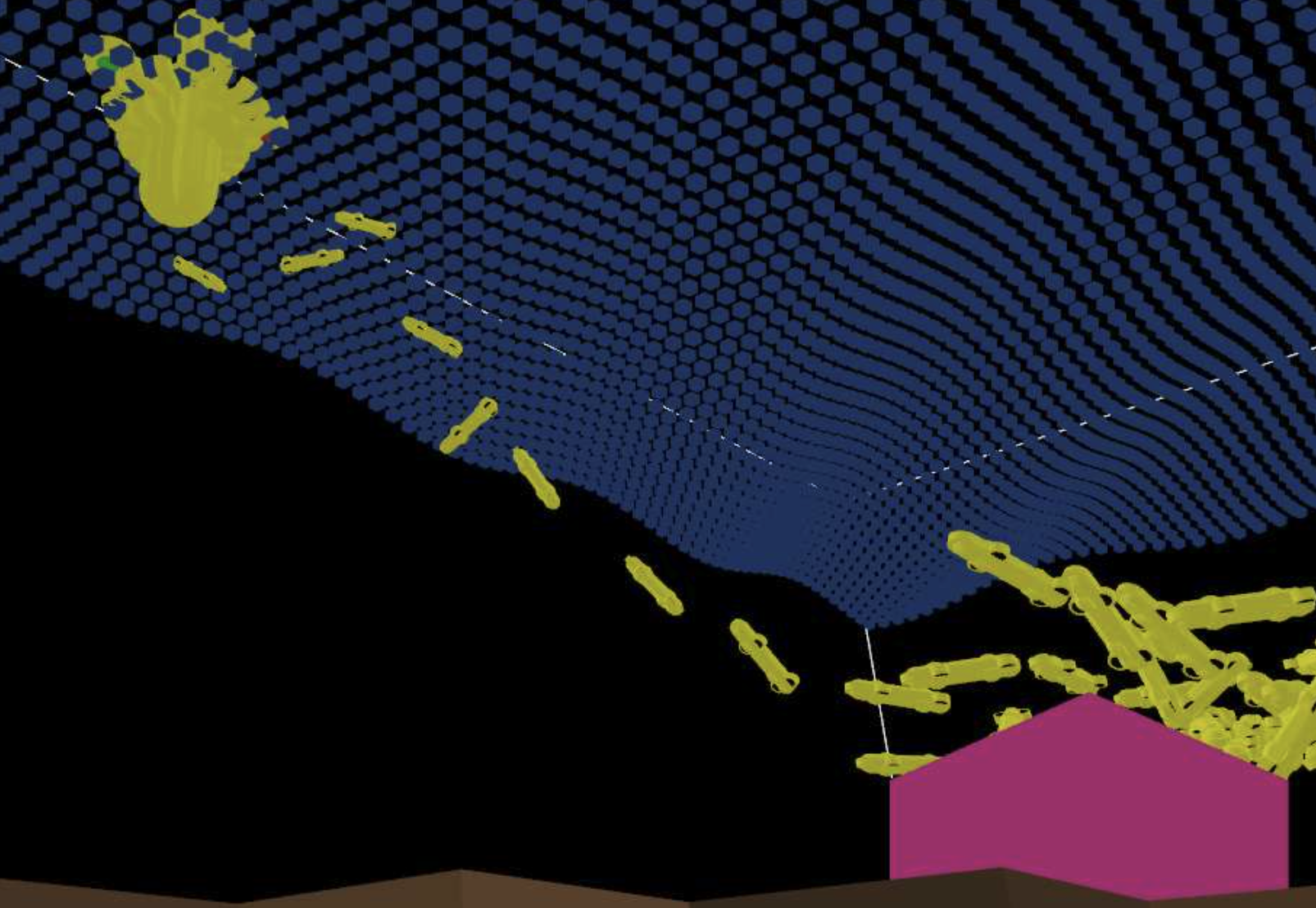
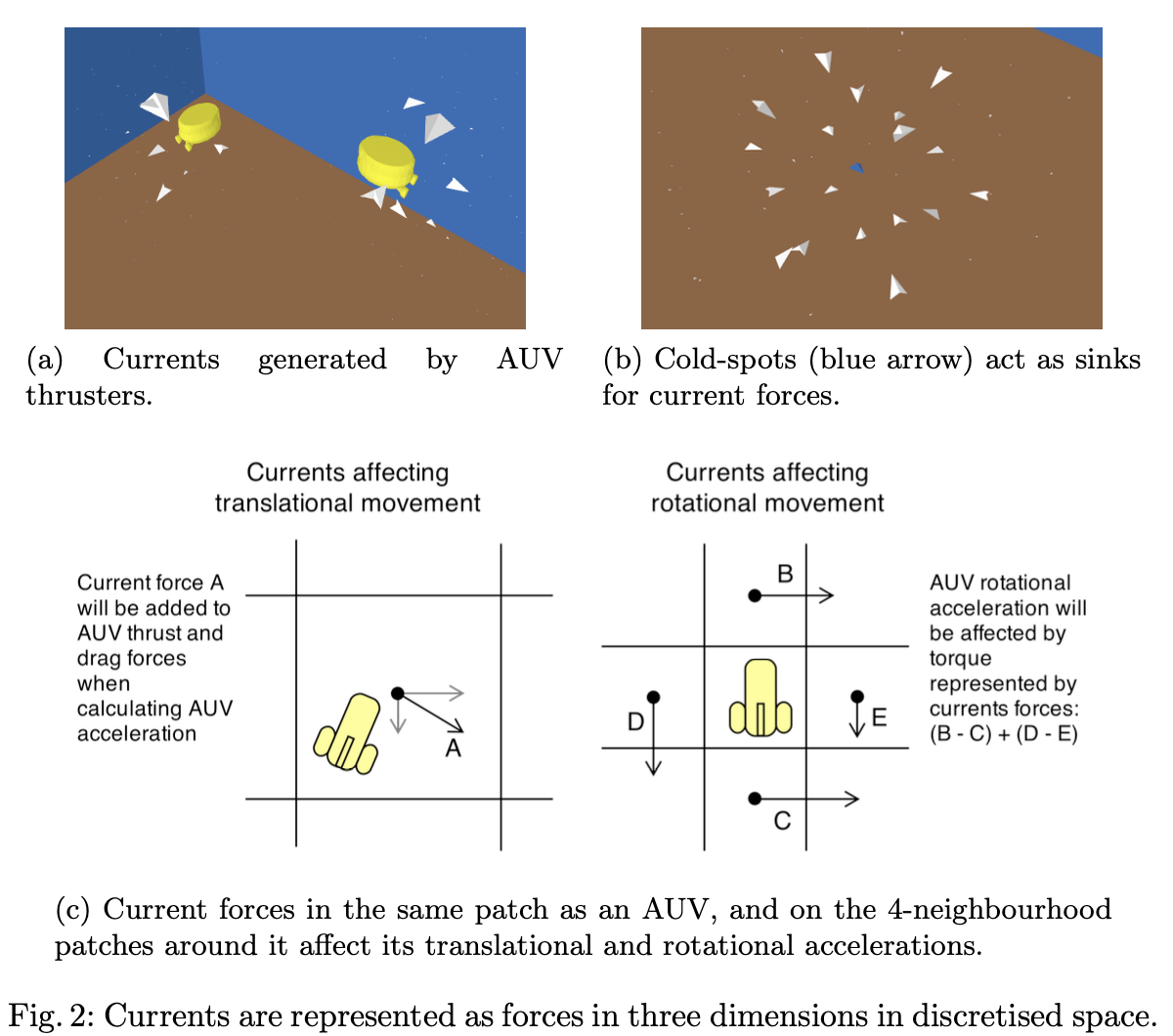
Whilst at The University of York, I worked on the ‘CoCoRo’ project, investigating the control of swarm robotic systems. I led the development of a simulation of underwater environments and the robotic platforms that inhabit them. The simulation possessed a rigid body physics engine and was capable of simulating water currents to represent turbulence.
Simulation hugely expedites the research and development of swarm robotic systems, particularly underwater, where working with real robots is time-consuming, can involve taking craft out of water and reprogramming them with new iterations of the control algorithms, and are prone to breakdowns.
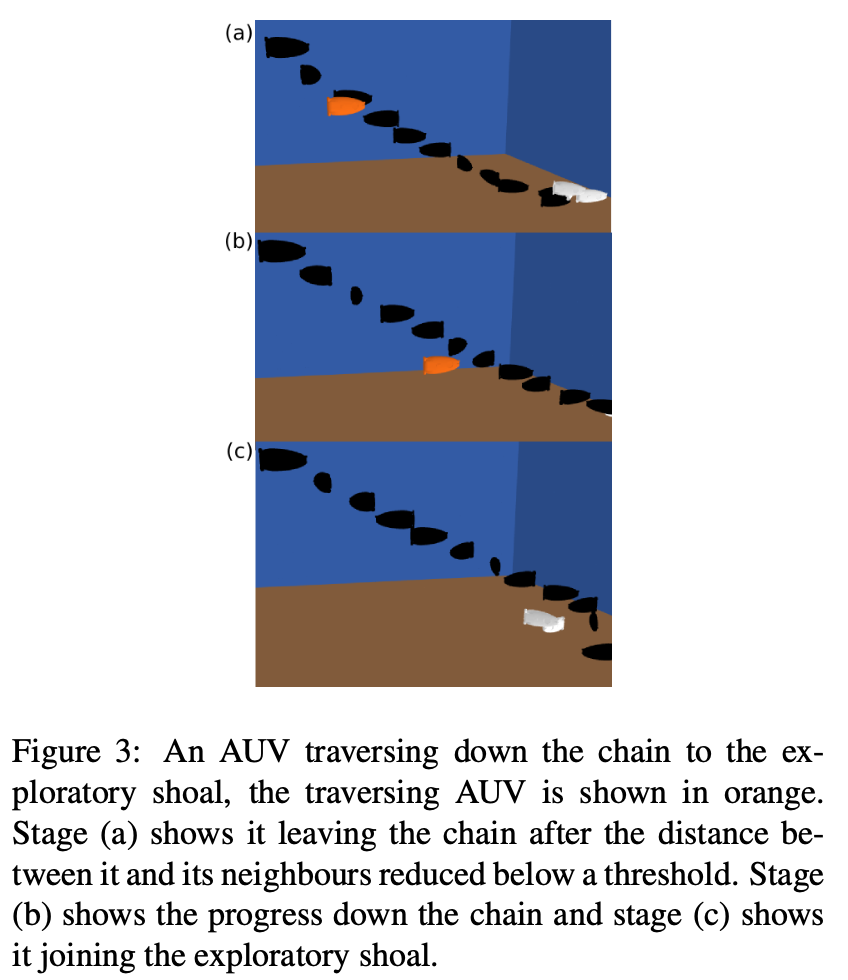
Through simulation, I designed algorithms through which the swarm explored the underwater environment, and would maintain a link of robots (a “chain”) between the exploratory shoal and the water surface. Underwater communication can be costly, in terms of bandwidth across communication systems. I examined the impact on shoaling performance that communication and sensing across different inter-robot communication systems would have.
Images sourced from the following publications:
- Initial paper on developing the simulation and the shoaling algorithm
- Follow-up paper on the self-organising chain connection of shoal to water surface. I designed the algorithm, but then left the University of York and Becky Naylor conducted the experiments and led the paper.
- CoCoRo mission statement paper